Saildrone USVs can not only significantly reduce the cost of ocean mapping at scale, but they can also more easily and efficiently reach the most remote corners of the ocean.
Autonomous Vehicles for Cost-Effective Global Ocean Mapping

Published on
October 15, 2019
Read time:
5
Minutes
An accurate map of the ocean bottom is necessary and vital to science and industry—not only for navigation and transportation, but also for fisheries, telecommunications, offshore energy, and understanding the ocean’s currents and physical properties related to weather and climate. Oceans make up more than 70% of the Earth’s surface, but we know more about the topography of several planets (and their moons) than we do about the ocean floor. To date, Mars has been 99% imaged by NASA’s Mars Reconnaissance Orbiter but only 20% of the ocean has been mapped with modern, high-resolution technology.
Ocean mapping, or bathymetry, typically requires a research vessel and a trained team to manually operate the equipment. It is an extremely expensive and time-consuming undertaking, further limited by fuel requirements, provisioning, and weather. The ability to map the ocean with an environmentally friendly long-range autonomous vehicle, which requires less manpower and therefore costs far less than traditional ship-based mapping, is invaluable. Saildrone unmanned surface vehicles (USVs) can not only significantly reduce the cost of ocean mapping at scale, but they can also more easily and efficiently reach the most remote areas of the ocean—those which we know the least about.
Explorers have been mapping the ocean for hundreds of years, but with crude and unreliable techniques; the Mariana Trench, the deepest part of the ocean, was discovered by throwing a weighted rope over the side of a ship. The technologies used to map other planets, optical and electromagnetic sensors (e.g. light and radar), are restricted in the ocean at depths greater than a few meters. Satellites have generated a coarse view of the shape of the deep ocean floor through altimetry-derived predicted seafloor depths, but do not provide enough spatial resolution or accuracy to understand bottom current features, submarine glacial landforms, or most geohazards.
Modern, high-resolution ocean mapping that meets or exceeds International Hydrographic Organization (IHO) standards is typically performed with a multibeam echo sounder mounted on the hull of a large ship. Recently, smaller, power-efficient multibeam echo sounders have been designed specifically for shallow-water (down to 200 meters/650 feet) while deep-water bathymetry still requires large power-hungry devices to image the bottom of the ocean at an average depth of 4,000 meters (13,000 feet). Rapid advances in acoustic technology and robotics over the past decade have led to several types of autonomous underwater vehicles (AUVs) that can be deployed to map small areas of the deep ocean at meter to sub-meter scale. However, the limited autonomy of onboard energy storage systems and the requirement of a support ship to launch and retrieve vehicles render such techniques inefficient and impractical for broad, regional mapping at scale.
A multipurpose platform
Saildrone partnered with the University of Southern Mississippi (USM) and the National Oceanic and Atmospheric Administration (NOAA) to test the accuracy and longevity of the Saildrone platform for shallow-water multibeam bathymetry. Saildrone USVs are powered exclusively by the wind for propulsion making them environmentally friendly and inobtrusive to the environment they are surveying. Solar energy powers a suite of onboard science sensors to collect a variety of in-situ meteorological and oceanographic measurements. Hourly and minutely data is available in real time on the Saildrone Mission Portal; high-resolution data is downloaded from the vehicle upon retrieval.
During the summer of 2019, two saildrones working collaboratively demonstrated what the future of bathymetry will look like.

The first vehicle, SD 1024, known as the “Surveyor,” was equipped with a shallow-water multibeam echo sounder initially deployed in the Gulf of Mexico. During the 10-day mission, SD 1024 sailed narrow transects designed to show that the vehicle could steer accurately enough to conduct a multibeam survey in shallow water and that the vehicle’s power budget could handle the requirements of a multibeam system operating 24/7. The echo sounder bounces 512 pings of sound 20 times per second off the ocean floor, adjusted for heel and roll.
“I was very impressed by how well the Saildrone could drive in a straight line and maintain close proximity to the planned survey lines. Even during light winds, the navigation was excellent,” said Brian Connon, director of USM’s Hydrographic Science Research Center (HSRC).

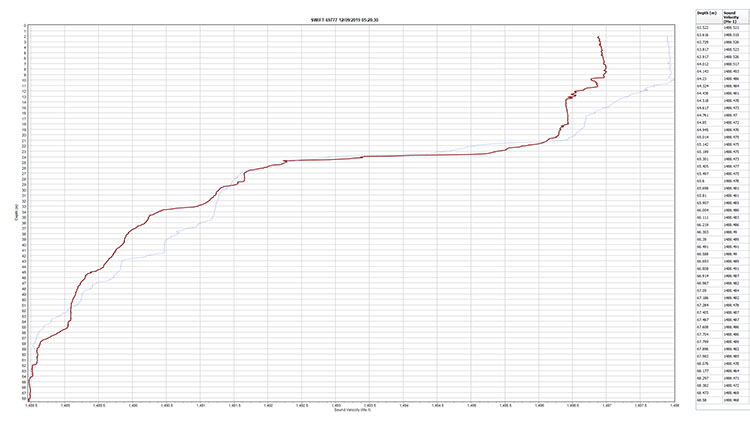
However, the accuracy of the data is significantly reduced without a sound velocity profile, which is the speed of sound through the water column. To perform sound velocity profiling, Saildrone has designed an autonomous winch system, which lowers the profiling sensor in the water column to directly measure sound velocity approximately every half meter.
The second vehicle, SD 1025, known as the “Profiler,” was equipped with an autonomous winch for sound velocity profiling. SD 1025 (Profiler) and SD 1024 (Surveyor) were deployed off the coast of San Francisco in September 2019. Working collaboratively, the two saildrones successfully mapped a coastal area, performing more than 15 sound velocity profiling casts over a three-day period, with the deepest cast reaching a depth of 85 meters (280 feet). This collaborative approach allows for maximum efficiency: one vehicle surveying non-stop 24/7 while the other takes regular sound velocity profiles.
“All of the data was uploaded and available to download from Saildrone’s servers within five minutes of each cast completion,” said Matt Paulson, program manager for single and multibeam bathymetry at Saildrone.
Multibeam sound data isn’t only used for mapping; the backscatter off the ocean bottom can be used to infer the seafloor type, for example, rock, coral, sand, mud, or clay—useful information for nautical charting, anchorages, and resource and habitat management. Certain species of fish or crab prefer a certain type of seafloor. Knowing where different types of seafloor are located could help fisheries managers to make decisions about the best areas to set aside to protect different species. Marine construction and telecommunications also require knowledge of the seafloor type, and water column data can be used for fisheries or natural resource surveys.
One of the most significant benefits to the Saildrone platform is that in virtually every case, the vehicle is collecting data for a variety of uses. While the echo sounder conducts surveys under the water, sensors at or above the sea surface are collecting valuable data for climate science and weather forecasting. Saildrones can conduct surveys day or night in rough sea conditions that most vessels would avoid, and in shallow areas that are both dangerous and too expensive for ships to survey.
Working collaboratively, Saildrone’s mapping USVs will be able to provide IHO-standard shallow-water bathymetry anywhere in the world, no matter how remote the area might be. They will deliver information that is critical for marine safety in areas previously uncharted, or after major disasters such as earthquakes, tsunamis, or hurricanes, which can significantly alter the seabed or create dangerous underwater obstacles.
The future of bathymetry
Seabed 2030 is a UN-backed joint initiative between GEBCO and the Nippon Foundation to produce a definitive map of the world ocean by 2030. Scientists estimate that it would take 350 ship-years to generate a complete map of the deep ocean (more than 200 meters/650 feet) at a cost of $3 billion. Saildrone proposes 20 vehicles equipped with multibeam echo sounders to meet the Seabed 2030 deadline. But this isn’t a one-time need.
The ocean floor is constantly in motion. Tsunamis and underwater earthquakes have a significant impact on bottom topography. In areas of deep ocean, the currents shift transporting sediment and biomass along the ocean floor. New islands are born, and others recede turning into reefs, which present a navigational hazard. The ocean must be accurately and repeatedly mapped to fully understand Earth’s processes and achieve scientific and economic objectives, and autonomous technologies will play a key role in enabling the Seabed 2030 vision.
Must Read


[
NEVER MISS AN UPDATE
]
Stay informed with the latest research findings and updates.
By clicking Sign Up you're confirming that you agree with our Privacy Policy.
